
标签 de 相关的文章:

翠苑北二区申请原拆原建
本文转自:钱江晚报210户住户中 已有160户愿意掏钱翠苑北二区申请原拆原建浙江老旧小区自主更新政策出台后,它成为首个递交申请的小区 记者走访时,小区居民正在热议原拆原建4月11日,省建设厅等部门发布《关于稳步推进城镇老旧小区自主更新试点工作的指导意见(试行)》。它的出台,意味着今后浙江老旧小区自主更新将有章可循。一石激起千层浪。有读者向本报记者报料,就在指导意见发布当天,杭州一小区“火速”提出自

一艘“雪龙”号:中国极地科考40年
本文转自:青岛日报一艘“雪龙”号:中国极地科考40年市民登船体验“大国重器”魅力,了解我国极地科考发展进程 ■“雪龙号”科考船停靠在青岛奥帆中心码头。 韩 星 摄□青岛日报/观海新闻记者 李勋祥今年是中国极地考察40周年。作为纪念中国极地考察40周年的一个重要组成部分,“雪龙”号停靠青岛并举办为期3天的开放日活动。其间,记者登上“雪龙”号,探秘这艘“大国重器”,探寻我国极地科考变化。仪器设施更加完

2023年度图灵奖揭晓!他拿大奖“拿到手软”
)将2023年度图灵奖授予以色列数学家、美国普林斯顿大学高等研究院教授阿维·威格德森(Avi Wigderson),以表彰他在计算理论领域的奠基性贡献,尤其是重塑了人们对计算中随机性的理解,以及他在理论计算机科学领域几十年来发挥的主导作用。作为图灵奖奖励的一部分,威格德森将获得100万美元奖金。这已不是威格德森首次斩获大奖。2019年,他就凭借在随机计算、密码学、并行计算等计算机科学基础领域作出的

机器人采草莓 24小时不喊累
本文转自:中国科学报 机器人在采草莓。南京农业大学供图本报讯(记者李晨 通讯员赵广欣)近日,南京农业大学教授汪小旵团队成功研发了一款草莓选择性采收机器人。在丰收的草莓园中,你可以和这台最先进的机器人一起踏上一场充满乐趣和科技感的草莓采摘之旅。汪小旵介绍,由于草莓采摘工作繁重而精细,需要大量人力,生产成本较高。为了解决该问题,降低劳动强度、减少生产成本,“草莓选择性采收机器人”应运而生。“草莓选择性

嘉兴人寿举办“2024国寿演说家” 企业文化演讲活动
本文转自:南湖晚报众志“双成” 实干创未来嘉兴人寿举办“2024国寿演说家” 企业文化演讲活动 N晚报记者 孔嘉敏 □图片由中国人寿嘉兴分公司提供为进一步引导广大干部员工深刻理解中国人寿企业文化体系内涵,充分发挥企业文化统一思想、凝聚士气、引领发展的作用,4月2日下午,中国人寿嘉兴分公司举办以“众志‘双成’实干创未来”为主题的“2024国寿演说家”企业文化演讲活动。经过前期各支公司、各机关党支部推

云上悦府:启幕全新生活范本
本文转自:嘉兴日报 扫一扫,看读嘉报道TOD是一种未来的居住方式,它身上的标签很多:立体交通、单点高密、混合业态,垂直都市等。而正是如此复杂精密,让做好一个TOD都殊为不易。在嘉兴,已经有项目率先做出了尝试,它就是信达铁投·云上悦府。云上悦府作为嘉兴首个TOD空中都会,以归家动线、配套服务、社区运营、产品创新等诸多考量,构成云上悦府参与TOD的基石和底座。有轨电车T1线庆丰路站,完全“内嵌”云上悦
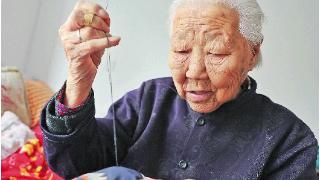
百岁老太,穿针引线
本文转自:齐鲁晚报 虽已年过百岁,老人还时常穿针引线缝缝补补。 老人至今都能熟练地剪窗花。 看着小辈们都已成家立业,老人很是开心。 老人从不挑食,能自己吃饭。 老人的房间干净整洁,铺床叠被都是自己干。 老人虽满头银发,仍精神矍铄。 儿子无微不至的照顾,让老人生活得舒心惬意。 文/片/视频记者王鑫3日上午9点,刚过完百岁生日的老人方荣珍坐在家中客厅剪窗花,看到有人来访,她热情地起身打招呼,手脚灵活、

网红餐饮店排队火爆,是人气还是泡沫?
本文转自:每日商报有的付钱雇人排队 有的被指“饥饿营销” 还有黄牛倒卖票号网红餐饮店排队火爆,是人气还是泡沫? C雇人排队、专业充场……眼见也有可能为“假”在互联网的数据之外,在现实里看到的澎湃人流也未必全为真。早些年,就有一二线城市的网红店铺雇“托”排队,制造气氛的案例。在业内,将这种店家为了制造店铺人气旺盛的假象,而专门花钱雇人进行排队的情况,叫“充场”。这往往都是有人负责组织,甚至还有专门的

引进新装备 提升“智造”水平
本文转自:南京日报 昨天,位于六合区横梁街道的南京大劲精密机械有限公司生产车间内,工人正在生产精密仪器零部件。该企业是一家主营精密产品结构件、毫米波组件、治具设计的科技型企业,生产的光学仪器仪表、红外仪器仪表以及高频通信零部件多应用于新能源汽车和机场安检仪等场景,新近投入1500万元引进高端装备, 提升“智造”水平 。 通讯员 刘亚京 苗建鹏 南京日报/紫金山新闻记者 董家训 摄
人形机器人也能叠衣服了
。人形机器人是具身智能最佳载体之一。优必选人形机器人Walker S通过百度智能云千帆AppBuilder平台接入百度文心大模型进行任务调度应用开发,快速构建了任务规划与执行能力。在完成柔软物体操作(叠衣服)和物体干扰分拣等任务时,Walker S依靠端侧多模态感知模型获得空间定位与语义信息后,将信息交由文心大模型进行任务理解与规划,协同配合机械臂和灵巧手的精准操作,成功完成全套任务流程。此次优必


